
Indice
Nel mondo dell’agricoltura di precisione, c’è una sfida che ha resistito all’automazione più di altre: la raccolta dell’uva da tavola. Per un robot, infatti, questa operazione rappresenta un vero e proprio incubo. Non si tratta solo di staccare un frutto dalla pianta, ma di lavorare con un prodotto dalla forma irregolare, i grappoli fitti e i tralci sottili. La variabilità biologica, l’occlusione di foglie e rami, e persino le condizioni di luce rendono difficile individuare con precisione il punto esatto da cui recidere il grappolo. Eppure, un team cinese ha fatto un notevole passo avanti.
- Leggi anche: Raccolta dell’uva: meccanizzarla si può
YOLO v8n-DWF: la sigla che promette la raccolta dell’uva automatizzata
Il gruppo di ricerca della Shandong Agricultural University, in Cina, ha sviluppato un sistema chiamato YOLO v8n-DWF, una rete neurale avanzata pensata per localizzare con precisione i punti di raccolta dell’uva da tavola. Il nome sintetizza (o quasi) una combinazione di tecnologie:
- YOLO v8n, una versione “nano” dell’algoritmo You Only Look Once, tra i più rapidi per il riconoscimento oggetti;
- DCN (Deformable Convolutional Networks) che introduce una flessibilità nella “vista” del modello, adattando le convoluzioni alla forma reale del grappolo;
- WIoU v3 (Wise Intersection over Union) migliora la capacità del modello di valutare e correggere le imprecisioni sui target più difficili, come i tralci;
- una quarta testa di rilevamento, pensata su misura per oggetti piccoli e complicati.
Insieme, questi ingredienti costituiscono una ricetta molto promettente per rendere la raccolta dell’uva automatizzata più di una curiosità da laboratorio.
Un dataset coltivato sul campo
Il training del modello è stato curato con rigore quasi artigianale. Gli scienziati hanno raccolto 2777 immagini di vigneti reali, scattate in diverse stagioni, orari e condizioni di luce, dall’alba alla notte. Le varietà d’uva testate sono state le più comuni nei mercati asiatici: Summer Black, Shine Muscat, Kyoho.
Le immagini sono state etichettate in due categorie: “grappolo” e “asse”, cioè il tralcio. Per addestrare la rete, i ricercatori hanno diviso le immagini in set di training, validazione e test. L’obiettivo era chiaro: addestrare un algoritmo capace non solo di “vedere” l’uva, ma di capirne l’anatomia.
Il cuore dell’innovazione è il sistema di localizzazione geometrica del punto di raccolta. A partire dalle immagini processate da YOLO v8n-DWF, il sistema misura l’aspect ratio del tralcio (altezza/larghezza): se il rapporto supera un certo valore (3), si presume che il tralcio sia dritto, e il punto di taglio viene calcolato in basso al centro. Se inferiore, il tralcio è piegato e viene usato un filtro mediano per determinare la zona di maggiore contrasto di grigi, ovvero il punto dove verosimilmente si trova la connessione al grappolo.
- Leggi anche: Avversità in vigneto, un robot per prevenirle

Immagine di localizzazione dei punti di raccolta dell’uva da tavola.
Una raccolta dell’uva quasi perfetta
Come riportato nello studio, il sistema ha ottenuto risultati sorprendenti:
- precisione complessiva: 97,9%
- precisione specifica sui tralci: 97,0%
- mAP50 (media della precisione a soglia 0.5): 97,6%
- tasso di successo della localizzazione: 88,24%
- tasso di raccolta effettiva in campo: 87,40%.
Per dare un termine di paragone, l’approccio YOLO-GP – versione precedente del dispositivo – si fermava a un 80% circa di localizzazione. E il modello YOLO v8n-DWF, con appena 4,19 milioni di parametri, batte per efficienza e accuratezza modelli molto più pesanti.
Il robot, però, non è infallibile. I ricercatori hanno infatti identificato tre limiti principali, che riguardano la presenza di tralci deformati o troppo lunghi; occlusioni da foglie o altri grappoli e la mancanza di una buona illuminazione, soprattutto in controluce. Si tratta di casi in cui il modello può confondere l’uva con rami o sfondi, o semplicemente non vedere nulla. In serbo, però, c’è già la soluzione: il passaggio dal riconoscimento a una segmentazione di istanze, in grado di distinguere meglio ogni singolo tralcio. Accanto a questo, si procederà con la gestione attiva dell’illuminazione e il filtraggio dei disturbi visivi.
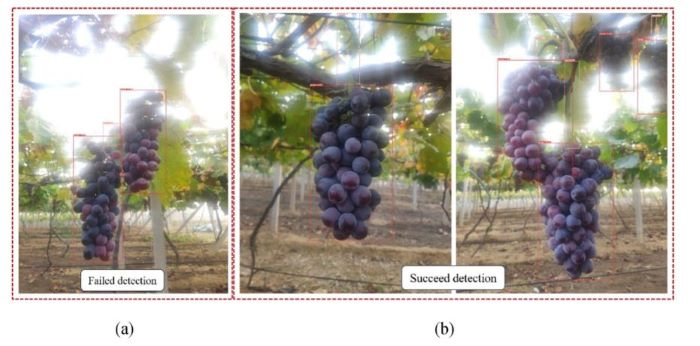

Risultati del rilevamento in diversi ambienti di illuminazione: a controluce, b controluce, c illuminazione frontale, d illuminazione notturna.
Dalla raccolta alla potatura
Un dettaglio non trascurabile: il robot non è stato progettato solo per raccogliere. Il sistema è infatti pensato per operazioni multiple, come il diradamento dei grappoli o la potatura, che lasciano ipotizzare un impiego sempre più strutturato di qui al prossimo futuro.
Già nel caso della raccolta automatica dell’uva, il progetto YOLO v8n-DWF ha dimostrato che parliamo di una realtà sempre più vicina. Il sistema funziona, è preciso, ed è abbastanza leggero da essere impiegato sul campo con hardware a basso consumo. Certo, resta da superare il problema dell’occlusione e della luce, ma il sentiero è tracciato.
E in un comparto dove la manodopera agricola scarseggia e i costi aumentano, vedere un braccio robotico che raccoglie con cura un grappolo può essere più di una scena suggestiva: è il segno che anche la raccolta dell’uva può diventare smart.
Ilaria De Marinis
@uvadatavola.com